


.jpg?#)



















Sols 4391-4392: Rounding the Bend
Earth planning date: Wednesday, Dec. 11, 2024 For planning today, we have a beautiful view of the northern tip of Texoli, as seen in the image foreground. Unfortunately, the rocks that make the view so pretty also made it unsafe to unstow the arm for contact science. Instead we are doing a lot of imaging […]

3 min read
Sols 4391-4392: Rounding the Bend
Earth planning date: Wednesday, Dec. 11, 2024
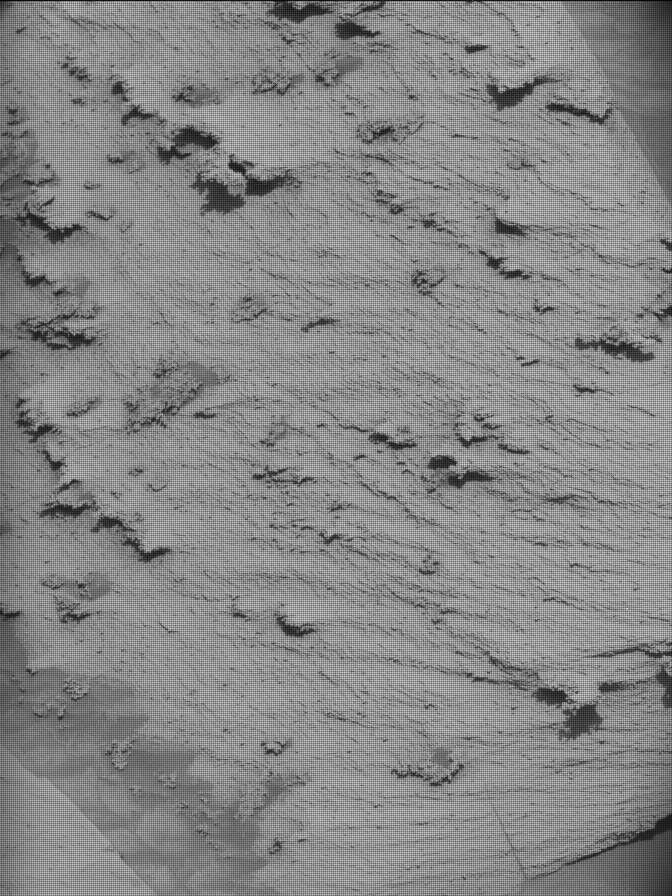
For planning today, we have a beautiful view of the northern tip of Texoli, as seen in the image foreground. Unfortunately, the rocks that make the view so pretty also made it unsafe to unstow the arm for contact science. Instead we are doing a lot of imaging and a drive. Our primary remote science target for ChemCam LIBS and Mastcam stereo is “Backbone Trail,” a block with multiple veins, to measure the composition and orientation of the layers. We also have ChemCam RMI targets of “Wilkerson” butte and “Grant Lake” crater to the north. Mastcam is also taking several other mosaics of “Gould Mesa,” a butte that is newly in view, and some sedimentary ripple features in the “Dry Lake,” and “Jawbone Canyon” bedrock targets. And, since we are as close to the northern point of Texoli as we will get, we of course also take a Mastcam mosaic of the spectacular layered blocks there.
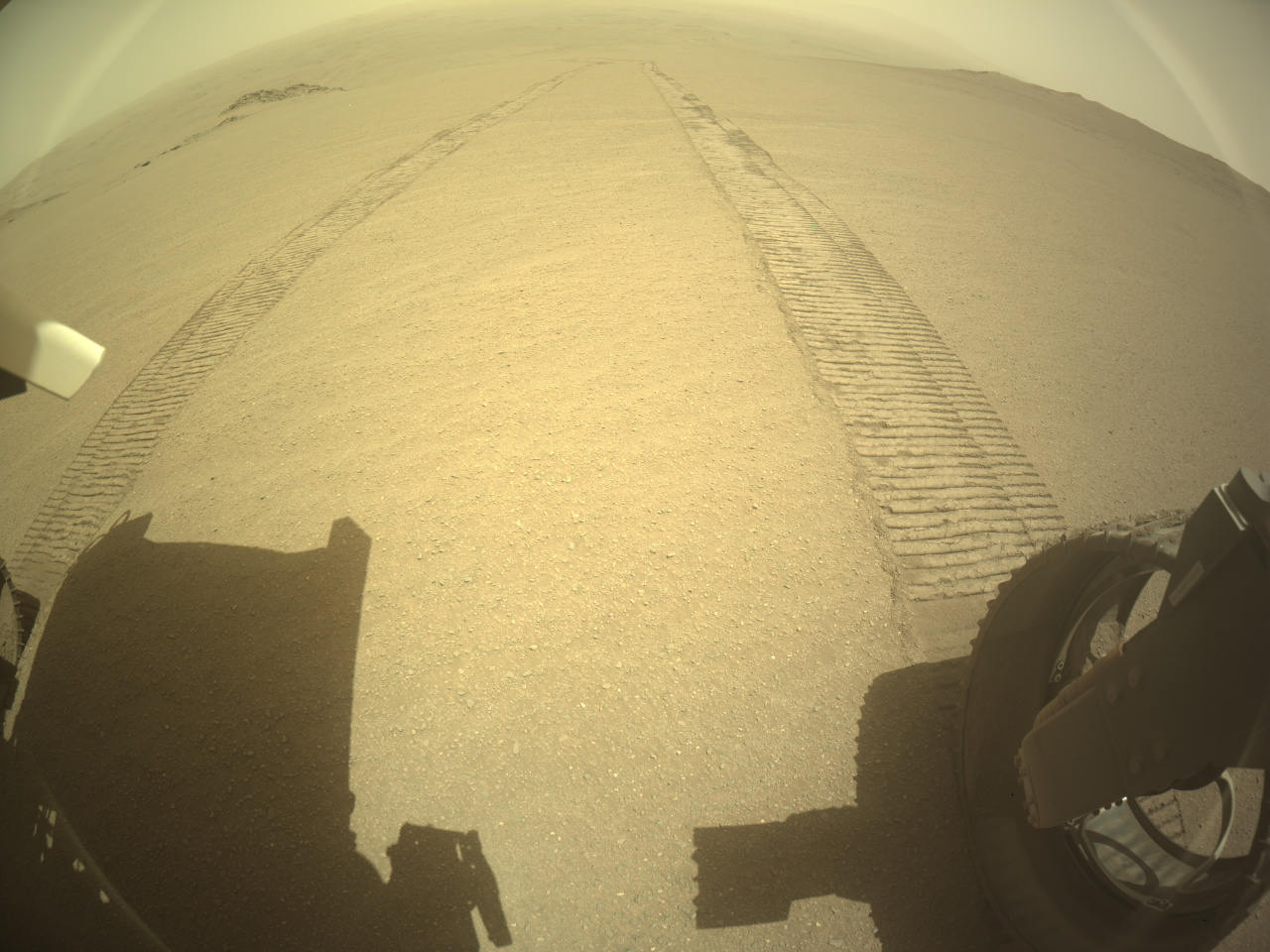
After a nap, we’re ready to drive! I got to plan the drive today as Mobility Rover Planner, but the complex terrain really required all of the Rover Planners on shift today. While we want to head southwest, we had to divert a bit to the north (right of the image shown) to avoid some big blocks and high tilt. The path is very constrained in order to avoid driving over some smaller pointy rocks, scraping wheels along the sides of blocks, or steering into the side of blocks that might cause the steering to fail. And we also needed to worry about our end-of-drive heading to be sure the antenna will be clear to talk to Earth for the next plan. We ended up relying on the onboard behavior to help us optimize everything by implementing a really interesting and curvy 24-meter path (about 79 feet). Finally, after the drive we are taking a sun observation to help reduce error in the rover’s onboard attitude estimate. Hopefully this drive will get us past the occlusion created by Texoli and allow us to see a long way southwest for our next series of drives.
The second sol of the plan, the untargeted observations after the drive, focuses primarily on atmospheric observations, including Mastcam solar tau, and a long series of Navcam suprahorizon and dust-devil images and movies. We also let Curiosity choose her own target using AEGIS. Can’t wait to see what she picks!
Written by Ashley Stroupe, Mission Operations Engineer at NASA’s Jet Propulsion Laboratory
Share
Details
Related Terms
Explore More




What's Your Reaction?