


.jpg?#)




















Sols 4193-4194: Stay Overnight? No, Touch-and-Go!
Earth planning date: Wednesday, May 22, 2024 One of the biggest challenges that comes with operating a rover on another planet is that we don’t always know exactly what we’re going to have in front of us when we park after driving. The science teams and our rover planners (who actually plan out the drives) […]
4 min read
Sols 4193-4194: Stay Overnight? No, Touch-and-Go!
Earth planning date: Wednesday, May 22, 2024
One of the biggest challenges that comes with operating a rover on another planet is that we don’t always know exactly what we’re going to have in front of us when we park after driving. The science teams and our rover planners (who actually plan out the drives) do their best of what we have available, consisting of a combination of high-resolution imagery from the HiRISE camera onboard the Mars Reconnaissance Orbiter and images from Curiosity looking off in our planned drive direction.
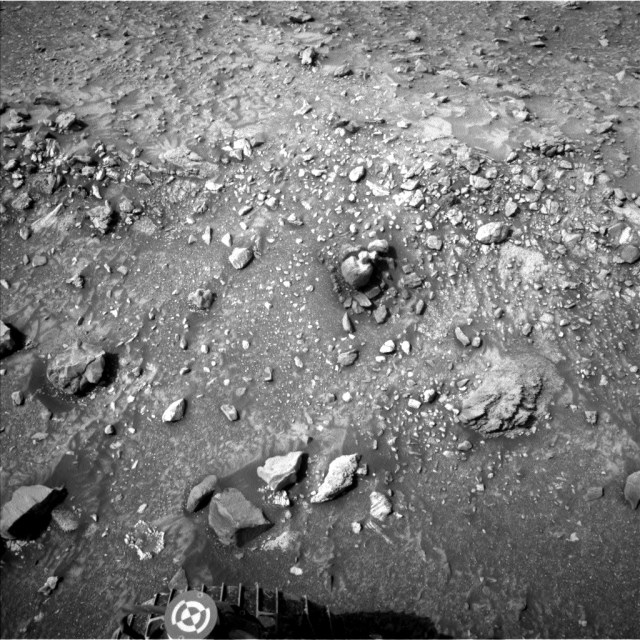
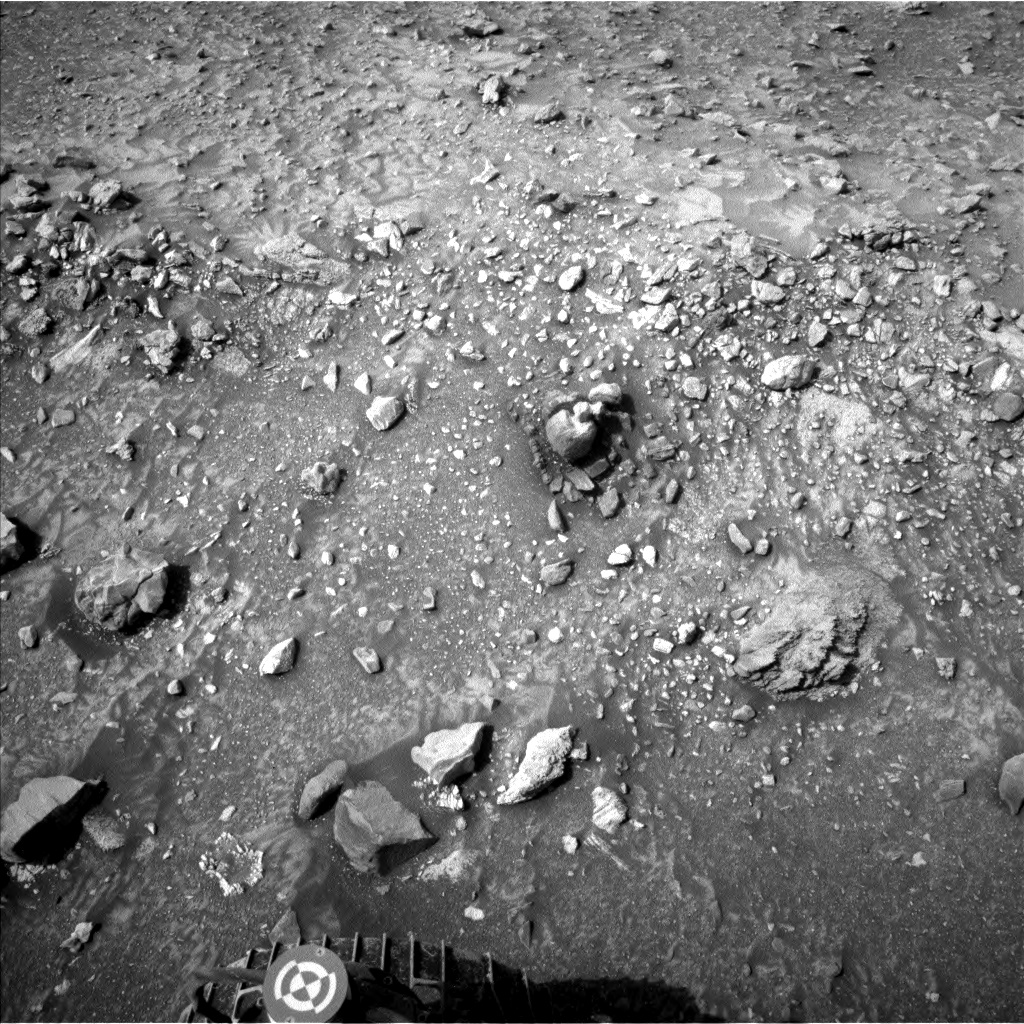
Ultimately though, we don’t know what we’re going to be dealing with on any given planning day until we actually get there. Sometimes that’s because the drive “faults” and ends early, something that happens when driving over rocky or sandy terrain that causes the rover’s mobility systems to exceed their maximum allowable limits. That wasn’t the case today, as the 30 metre drive further towards the Gediz Vallis channel crossing that we planned on Monday executed perfectly. Instead, our “workspace” (the area in front of the rover that is reachable by the arm) was not as exciting as we had anticipated, consisting mostly of sand and smaller rocks.
Consequently, it was decided to convert today from a “contact science” plan where we unstow the arm on the first sol for a lengthy list of activities before driving away on the second sol, to a “touch and go” plan where we mostly focus on remote sensing and a more limited list of contact science activities (the “touch”) and drive away on the first sol (the “go”). From the environmental science side, these kinds of major plan reorganizations can be a bit stressful as they often involve lots of last-minute shuffling around of our pre-planned activities, but the transition today was thankfully fairly straightforward.
The decision to convert the plan ended up being a good decision anyway, as we parked with our left front wheel on top of a pile of small rocks, which limited the kinds of arm activities we could safely perform regardless of how interesting the workspace was. Moving the drive from the second to the first sol also means that we’ll be able to get more useful data down to Earth before planning for the long weekend begins on Friday.
Despite the less interesting workspace (and setting aside the fact that calling any part of the surface of another planet “less interesting” feels a little crazy), we’re still fitting a decent amount of science into this plan. The first sol kicks off with our remote sensing, beginning with ChemCam LIBS on “Lake Catherine” and two ChemCam RMI mosaics, one on the Kukenán butte that’s filled up our eastern view for many months now and another on “Echo Ridge,” a feature near the rover that we’re currently driving towards in the hopes of understanding its origin. Mastcam then performs its documentation of the LIBS target and takes a couple of images of “Evelyn Lake” and “Emerson Lake,” two of the slightly larger rocks that lie just outside of the current workspace.
We wrap this remote sensing session up with some environmental science, including a Mastcam tau to monitor the amount of dust in the atmosphere, a dust devil movie, and Navcam monitoring of the dust and sand on the rover deck. Before we drive, we briefly unstow the arm to take some MAHLI observations of Lake Catherine. Curiosity finishes its first sol in this plan by driving away, followed by our standard suite of post-drive images to help us with planning on Friday, including another Navcam deck monitoring mosaic to see if the drive moved around any of the sand and dust.
Because we’ll be in a new location, the second sol of this plan is all untargeted remote sensing. ChemCam will use AEGIS to autonomously search for a LIBS target in our new location, then we’ll take a series of short Navcam movies to look for dust devils around the rover and a Navcam 3×1 line-of-sight mosaic to determine the amount of dust currently in the atmosphere within Gale. Shortly after noon, Curiosity will call it a day (or sol, really) and head back to sleep for the rest of this plan, occasionally waking up to phone home with the data it has gathered. As always, DAN, REMS, and RAD remain hard at work in the background, RAD particularly so given the high solar activity that has been seen recently.
Written by Conor Hayes, Graduate Student at York University
Share
Details
Related Terms
Explore More



What's Your Reaction?