


.jpg?#)




















NASA, Collaborators Announce a New Student Lunar Autonomy Challenge!
Space is hard, but it’s not all hardware. The new Lunar Autonomy Challenge invites teams of students from U.S. colleges and universities to test their software development skills. Working entirely in virtual simulations of the Moon’s surface, teams will develop an autonomous agent using software that can accomplish pre-defined tasks without help from humans. These […]
3 min read
Preparations for Next Moonwalk Simulations Underway (and Underwater)
Space is hard, but it’s not all hardware.
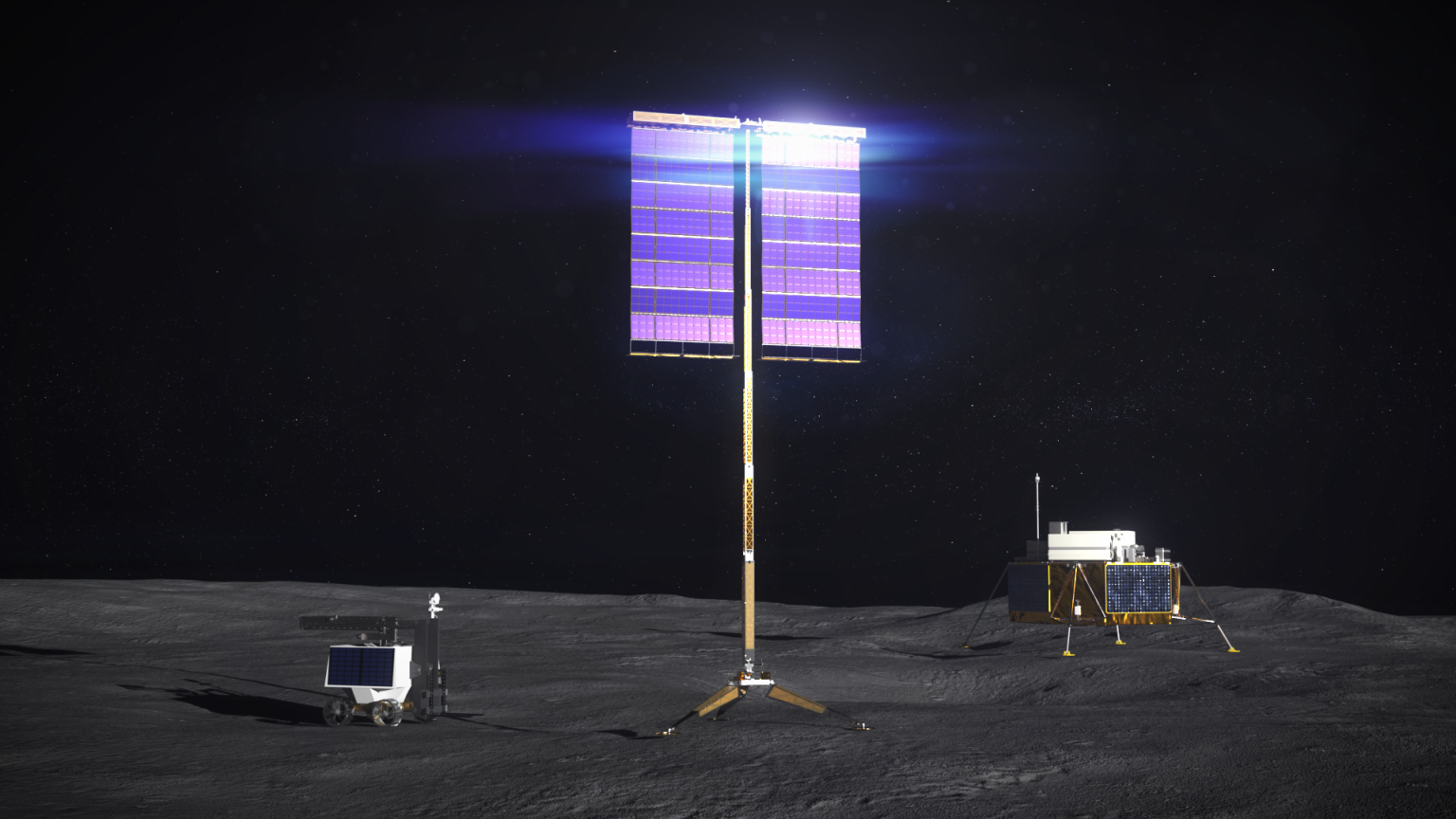
The new Lunar Autonomy Challenge invites teams of students from U.S. colleges and universities to test their software development skills. Working entirely in virtual simulations of the Moon’s surface, teams will develop an autonomous agent using software that can accomplish pre-defined tasks without help from humans. These agents will be used to navigate a digital twin of NASA’s ISRU Pilot Excavator (IPEx) and map specified locations in the digital environment. The IPEx is an autonomous mobility robot engineered to efficiently collect and transport lunar regolith, the loose rocky material on the Moon’s surface.
Autonomous systems allow spacecraft, rovers, and robots to operate without relying on constant contact with astronauts or mission control. Before hardware is trusted to operate independently on location, which for Artemis missions includes the Moon, it must be tested virtually. High-fidelity virtual simulations allow NASA to anticipate and improve how systems, both software and hardware, will function in the physical world. Testing in virtual simulations also allows technologists to explore different mission scenarios, observe potential outcomes, and reduce risks.
In the Lunar Autonomy Challenge, students will develop their knowledge of autonomous systems by working with the same simulation tools created in-house by Caterpillar Inc. of Irving, Texas, over decades of research and development. Teams will need to utilize the IPEx digital twin’s cameras and orientation sensors to accurately map surface elevation and identify obstacles. Like with real lunar missions, teams must also manage their energy usage and consider the Moon’s harsh terrain and low-light conditions. Through the competition, participants will learn more about autonomous robotic operation, surface mapping, localization, orientation, path planning, and hazard detection.
Eligibility
Teams must be comprised of at least four undergraduate and/or graduate students and a faculty advisor at a U.S. college or university.
Challenge Timeline & Structure
The challenge will take place between November 2024 and May 2025 and will include both a qualifying round and a final round. Interested teams must apply by Thursday, Nov. 7.
- Round 1: Selected teams will develop and train their agent using provided virtual environments. Teams will have three opportunities to submit their agent to run in a qualification environment. For each submission, their agent will be scored based on performance.
The top scoring teams will be invited to continue.
- Round 2: Teams will work to further refine the agents. Teams will have multiple opportunities in total to submit their agents to the competition environment. The top three teams will be named challenge winners.
Challenge Guidelines
Interested teams should carefully review the Challenge Guidelines and the Lunar Autonomy Challenge site for more details, including proposal requirements, FAQs, and additional technical guidance.
Prizes
The top three highest-scoring teams on the leaderboard in the finals will be awarded cash prizes:
First Place: $10,000
Second Place: $5,000
Third Place: $3,000
Application Submissions
Applications must be submitted to NASA STEM Gateway by Nov. 7, 2024.
Learn more about the challenge: https://lunar-autonomy-challenge.jhuapl.edu
The Lunar Autonomy Challenge is a collaboration between NASA, The Johns Hopkins University (JHU) Applied Physics Laboratory (APL), Caterpillar Inc., and Embodied AI. APL is managing the challenge for NASA.

Authored by: Stephanie Yeldell, Education Integration Lead
Space Technology Mission Directorate
NASA Headquarters, Washington, DC



What's Your Reaction?